Europa pind, mis on üks Jupiteri neljast kuust, teeb tohutu vaenlase. Esiteks mähitakse see paksu jääkamara sisse, mis on Jupiteri massiivse gravitatsioonilise tõmbe abil lahti rebitud suurteks tükkideks. Siis on seal äärmiselt madal pinna gravitatsioon ja õhukesed, libedad kanjonid. Kuid kogu selle jää all arvatakse, et Europa omab vedeliku ookeani, mis võib elu toetada - see on meie järgmise päikesesüsteemi põhjaliku uurimise peamine eesmärk.
Seotud sisu
- Kes peaks juhtima, kui inimesed hakkavad kolonneerima teisi planeete?
- Jäiste geisrite puhkemise kohta Euroopas leidub tõendeid
- Kas me saame Marssi enda seest päästa?
Kuidas saab NASA sellest reetlikust väljakutsest üle? See ei saa kindlasti saata sellist ratastega roverit nagu Sojourner, mis tegi robotite jaoks ühe hiiglasliku hüppe, kui see 1996. aastal esimest korda Marsi Ares Vallesest läbi sõitis. Selle asemel soovib NASA need kord revolutsioonilised rattad kaotada ja kujutada ette, kuidas järgmine põlvkond robotite hulgast uuritakse lähiaastakümnete jooksul asteroide ja Päikesesüsteemi jäikaid väliseid maailmu.
Sisestage: LEMUR.
Praegu kaalub see umbes 75 naela ja see järgmise põlvkonna rover on murdosa Marsi uudishimu suurusest, mis registreerub peaaegu tonnil. Ainuüksi selle suurus ulatub robotivõime piirideni, kuid kui seda kunagi kasutusele võetakse, peab see tegema enamat. Pinti suurune rover peab taluma metsikult äärmuslikke temperatuure ja magnetilisi tingimusi; liikuda suvalisel pinnal; ja tehke seda piisavalt kaua, et koguda sisukamaid andmeid mõne kõige kergema ja nutikaima kosmoseteaduse instrumendiga, mis eales ehitatud.
Kas see on ülesande täitmine?
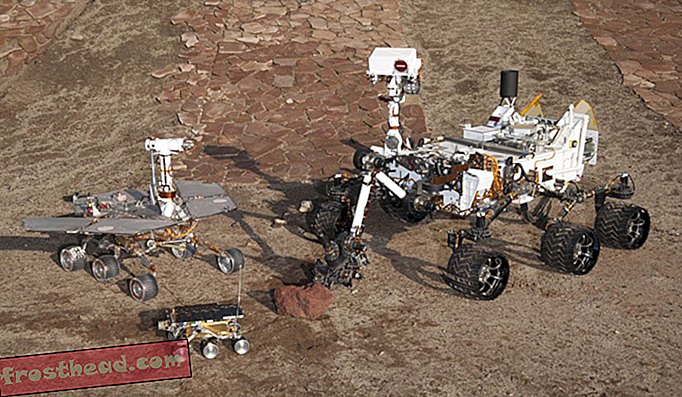 Kolm põlvkonda NASA Marsi marsruute aastatel 1997–2012, pildistatud Marsi õuel sees Jet Propulsion Lab'is Pasadenas, Californias: lennuvaru Sojournerile (ees), Mars Exploration Rover Projecti testimisrover (vasakul) ja Curiosity testmootor (paremal) . (NASA / JPL-Caltech)
Kolm põlvkonda NASA Marsi marsruute aastatel 1997–2012, pildistatud Marsi õuel sees Jet Propulsion Lab'is Pasadenas, Californias: lennuvaru Sojournerile (ees), Mars Exploration Rover Projecti testimisrover (vasakul) ja Curiosity testmootor (paremal) . (NASA / JPL-Caltech) Tõsi, robot LEMUR - akronüüm sõnale „jämeda liikumisega mehaaniline abirobot” - ei ole nii armas kui Dreamworksi Madagaskari poolt populaarseks muudetud laia silmaga ja koheva sabaga liigid . Pigem saab robot oma nime imetaja tegelikust kahepoolsusest. Kui algselt oli see mõeldud mehitatud kuude missioonide remondirobotiks, siis on rover ümber kujundatud kanjonite ja koobaste vertikaalse ja tagurpidi pinna mikrogravitatsiooniliseks uurimiseks.
“[Lemuurid] kasutavad liikumiseks ja manipuleerimiseks nii käsi kui jalgu, ” selgitas NASA reaktiivmootorite laboratooriumi (JPL) ekstreemkeskkonna robootikagrupi juht Aaron Parness. "Ehkki meie robotil pole selgesti eristatavaid käsi ja jalgu, sarnaneb see ahvile või leemurile selle poolest, et suudab oma jalgu kasutada asjade tegemiseks palju tõhusamalt, kui inimesed suudavad."
Tagamaks, et robot saaks liikuda veelgi võõrastes keskkondades, kui Marsil, on Parnessi grupp loonud nn kimimeroboti: robot, mis kasutab ära paljude erinevate maismaaloomade võimeid. LEMUR kutsub oma ulatuvate jäsemete ja mõlakujuliste jalgadega esile ämbliku või meritähe, kasutades oma lisanditega roomamiseks ja õhukestele pindadele klammerdumiseks.
Roboti neljal jäsemel on vahetatavad ümmargused jalad, mida saab Šveitsi armee noakujuliste erinevate funktsioonidega kinnituste jaoks välja vahetada, et aidata neil liikuda mitmesugustel pindadel. Kaljuronimisjalatsitel on rida pisikesi habemenuga teravaid konksusid, mida tuntakse kui mikrospiinid ja mis kinnitavad kivide karedaid pindu piisavalt kindlalt, et üks jalg mahutaks kogu roboti raskuse. Siledate pindade, näiteks kosmosejaamade või satelliitide väliskerede jaoks kleepub LEMUR end gekolaadsete kleepuvate jalgadega.
Hiljuti viisid teadlased LEMURi ühe käe Antarktikasse, et katsetada uut ja potentsiaalselt üliolulist kinnitust: kruvilaadsed jääpuurid. Kui Parness ja tema meeskond on valmis oma riistvara proovile panema, otsivad nad "kõige karmimad kohad, mida leida võime", ütles Parness. „Peame leidma õige tasakaalu selle vahel, et meil oleks õige keskkond, kuid samas ka mitte olla nii kaugel, et see on hullult kallis ja võimatu meeskonda sinna viia. Antarktika oli selle kõige äärel. "
Selleks kutsusid nad appi geograafiks osutunud vulkanoloogi-robotist Aaron Curtise, kes on mitu suve veetnud kaugel lõunaosa mandril, indekseerides ümber Maa lõunapoolseimas aktiivses vulkaanis asuva Erebusi mäe moodustatud jäiste tunnelite ümber. Kui suvetemperatuur on keskmiselt kuni -22 kraadi Fahrenheiti, vulkaan, selle tekitatavad jäävormid ja seisev laavajärv esindavad õiglast tingimust, mida jalaga rover võib kohata jäistel kuudel nagu Europa või Enceladus.
 Aaron Curtis reisis möödunud aasta detsembris Antarktikasse, kus ta testis roboteid ja instrumente, mis olid mõeldud sellistele jäistesse maailmadesse nagu Europa. (Nial Peters)
Aaron Curtis reisis möödunud aasta detsembris Antarktikasse, kus ta testis roboteid ja instrumente, mis olid mõeldud sellistele jäistesse maailmadesse nagu Europa. (Nial Peters) Kuue viimase seitsme aasta jooksul Mount Erebusi vulkaani observatooriumiga kaastöötajana kaardistas Curtis vulkaani ümbritseva jää topograafiat. Tema erilised huvid olid pinna all, koobastes ja tunnelites sulatasid jää vulkaanide lõhedest väljuvad gaasid. Kohtade otsimine, kus väljast ühendatud tunnelid olid mõnikord sama lihtsad kui kõrguva “jääkorstna”, meetri kõrguste ehitiste leidmine, mis tekkisid gaasi eraldumisel. Teinekord tähendas see koopa sissepääsude leidmist, kukutades mootorsaani kogemata varjatud auku maasse.
Olles veetnud neli aastat ühe koopa 3D-D kaardistamisel, et jälgida selle muutusi aja jooksul, sattus Curtis korduvalt samade väljakutsete poole. Esiteks ei pääsenud tema meeskond teatud piirkondadesse, kuna need olid inimeste uurimiseks liiga mürgised. Teiseks kartsid nad, et nende inimeste kohalolek võib harvaesinevat keskkonda tahtmatult saastada sissetoodud mikroobidega. Need kaks muret ajendasid teda kaaluma robotiuurijate kasulikkust.
"Kui meil oleks robot, mis saaks jääl ringi liikuda, võiksime uurida mikroobselt tundlikke ja gaasiga täidetud koopaid, " ütleb Curtis. Tema enda jäärobotite näpistamine sobis hästi JPLis käimasoleva töö jaoks, millega ta liitus eelmise aasta oktoobris robotina.
Selgub, et mikrospiinid kipuvad jääd lihtsalt hakkima, selle asemel, et neid kinni haarata, kuna lisaseadme eesmärk on lükata seljad kivi alla ostmiseks. Nii kavandas Curtis manuse, mille abil kasutasid jäiseid pinnale pisikesi trelle.
Algne disain sai jääga ummistunud, väitis Curtis, et ta pöördus inimese elu vastu entusiastide usalduse poole: riiulilt eemaldatavad jääkruvid. Need on õõnsad, võimaldades jääl läbi puurimisotsa taha koguneda, ning võimaldaksid LEMURil ka aeglaselt mööda hiilides jääproove toota ja koguda.
Järgmised jäämaailma katsed toimuvad tõenäoliselt Washingtonis Rainieri mäe ääres asuvatel liustikel - täieliku LEMUR-raami ja mitte ainult jalgade kinnituseta. Kuid Parness ütles, et võime proovivõtuvõimalusi testida rõhutab ka kogu arendusprotsessi teist peamist eesmärki.
"Väliuuringutega üritame alati saavutada kaks eesmärki: näidata tehnoloogiaid tulevaseks kasutamiseks, aga ka teha tähendusrikkaid teadusi selles kohas, " ütleb ta. Teisisõnu, mitte ainult LEMUR-testid aitavad meil mõista teiste kehade krüovolkaanid; "See on kasulik ka meile Maal, " ütleb Parness.
 LEMUR saab hiljutise proovijooksu ajal JPL-is Aaron Parness 'laboris treenida. (NASA / JPL-Caltech)
LEMUR saab hiljutise proovijooksu ajal JPL-is Aaron Parness 'laboris treenida. (NASA / JPL-Caltech) Juba enam kui 35 aastat on Penelope Boston otsinud mikroobide eluolu ja selle indikaatoreid äärmuslikes keskkondades, näiteks väävelhappega leotatud Cueva de Villa Luzis Tabascos Mehhikos. Oma endises koopa- ja karstialaste uuringute juhina New Mexico mäetööstuse ja tehnoloogiainstituudis, kus ta uuris maa-aluste koobaste ja kraanikausside vananemis- ja erosiooniprotsesse, suunas Boston Parness kohtadesse, kus tema meeskond ja LEMUR said teada, mida otsida, ja kuidas seda otsida.
"Olen aidanud Aaroni meeskonnal mõista, millised peent näpunäited võivad viidata võimalikele LEMURi huvipakkuvatele mikroobide või mineraalide ladestustele, " ütles Boston, kes nüüd juhib NASA Astrobioloogia Instituuti, e-posti teel.
Ta lisas, et võimaluste menüüs on mustrid, mis on jäetud kivimikihidesse või pinnasesse bioloogiliste protsesside tagajärjel, näiteks tekstuurid, mis näitavad, et mikroorganismid on tööl muutnud aluspõhja või mineraalide leiukohti. Maal on sellised tõendid olemas sellistes kohtades nagu Lechugilla koobas Uus-Mehhikos, kus arvatakse, et väävli, raua ja mangaaniga toituvad bakterid mängisid sealsete koobaste ja suurejooneliste kivimoodustiste kujundamisel rolli.
Mikroobide elust maha jäänud vihjed pole tavaliselt nii ilmsed. Kuid katsetades mitmesuguseid instrumente nii elusate kui ka kivistunud mikroobijääkide üle, saavad LEMURi-sarnased robotid paremini selgitada, kuidas need mikroobid elasid, oma keskkonda kujundasid ja surid.
Üks väljakutse on tagada, et tööriistad oleksid piisavalt mobiilsed. Lisaks riistvara testimisele on Parness ja tema meeskond teinud ülikoolikaaslastega koostööd miniatuursete kaugseire- ja analüüsimisinstrumentide väljatöötamisel. Idee on see, et LEMUR võiks neid kanda kõhul või seljakoti moodi, koopa või maastiku kaardistamiseks lidariga 3D-ga, gaasikromatograafiasse, orgaaniliste ja süsinikurikaste molekulide otsimiseks pisikese lähi-infrapunaspektromeetri abil.
"[Aaron] Parness'i grupp uurib võimalusi, kuidas anda LEMUR mustrituvastusele ja masinõppele, et aidata tal end inimesena näha, " ütles Boston. "Paleobioloogia võib sageli olla väga täpsema ulatusega ja peen ning täiustatud visuaalsed ja tõlgendamisvõimalused, mida robotid saavad lauale tuua, on potentsiaalselt tohutult võimsad tööriistad, mis aitavad meil paleobioloogiat paremini mõista ja mõista."
 JPL järeldoktor Aaron Curtis asus Antarktika mäel. Erebus, maakera lõunapoolseim aktiivne vulkaan. (Dylan Taylor)
JPL järeldoktor Aaron Curtis asus Antarktika mäel. Erebus, maakera lõunapoolseim aktiivne vulkaan. (Dylan Taylor) Valges Majas kavandatud föderaalse eelarve raames kaotatakse asteroidide ümbersuunamismissiooni - programmi, kus LEMURi kasutatakse kõige tõenäolisemalt - rahastamine. Parness ja tema meeskond on aga saanud suunata tööd LEMURi kallale. 2017. aasta lõpus suundub Parness tagasi Titus Canyoni alale Death Valleysse, kus ta on varem LEMURi testinud, peatudes suvel New Mexico laavatorude abil.
Seal seisavad 500 miljoni aasta vanused kivistunud vetikad analoogina potentsiaalsetele muistsetele jäänustele, kuid insenerid peavad veenduma, et LEMUR neid näeks. "Kui proovime elu otsida Marsi või teiste planeetide kaljuseintest, peaksime otsima vanimad jäljed elust Maal ja proovima oma instrumente seal, " ütleb Parness. "Kui me ei suuda elu enda planeedil tuvastada, siis mis annab meile kindluse, et suudame selle leida vanemast, karmimast proovist?"