Pisikeste silmalaseritega laseriga varustatud sümbolid, mis on eraldatud pisikestest silmalaseritest, võivad peagi olla võimelised tolmeldama põllukultuuride põlde, otsima ellujäänute jaoks varisenud hooneid või võtma õhukvaliteedi mõõtmisi suurtel aladel.
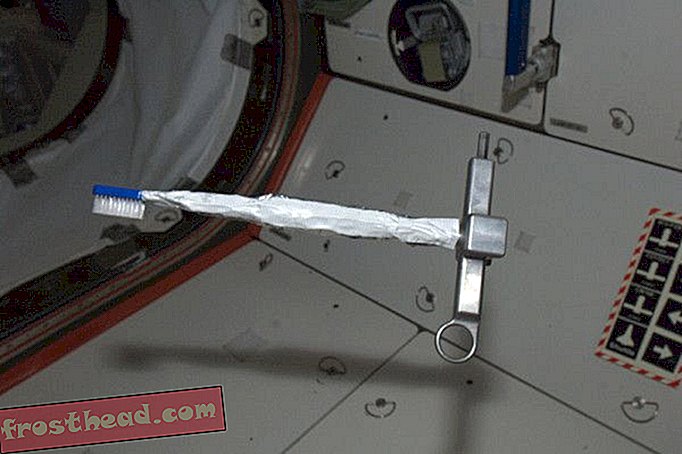
2012. aastal tegid Harvardi ülikooli teadlased pealkirju, kui nad lasid turule ainult milligrammi kaaluva putuka putuka ja vaatasid, kuidas see edukalt lendas ja maandus; aasta hiljem suutis see minna eelprogrammeeritud teele. Pärast seda on RoboBee õppinud, kuidas ujuda, kuid oma võimetes on endiselt suur lõhe: ta ei suuda tõhusalt näha.
Buffalo ülikooli ja Florida ülikooli teadlased töötavad selle nimel, et seda muuta. Järgmise kolme aasta jooksul katsetavad National Science Foundationi 1, 1 miljoni dollari suuruse toetusega Karthik Dantu Buffalos ja Sanjeev Koppal Floridas, kuidas vähendada lidaris kasutatavat tehnoloogiat ehk valguse tuvastamist ja ulatust, et anda väikesele droonid võimaldavad liikuda eesmärgi poole, ilma et teda juhiks inimene. Nad oleksid nagu Google'i isesõitvad autod, ainult tuhandeid kordi väiksemad.
“Vajasime intelligentse käitumise jaoks sügavuse andurit, ” sõnab Koppal. "Kui mõtlesime, milliseid tehnikaid võiksime kasutada, oli lidar nimekirja tipus."
1960. aastatel pärast laseri leiutamist välja töötatud lidar töötab täpselt nagu radari või sonari moodi, kuid valgusega. Negatiivsete valguskiirte seeria ümbritsevasse piirkonda pulseerides loob lidar üksikasjaliku keskkonnapildi, mis põhineb anduritele tagasi kergunud valgust. Lidar võib pildistamiseks kasutada valgust nähtava, ultraviolett- ja infrapunakiirguse lainepikkustes ning lühemad lainepikkused võimaldavad mõõta osakesi, mis on nii pisikesed kui õhus leiduvad aerosoolid.
Kuid väikseim kommertslik lidarisüsteem kaalub 830 grammi ehk ligi kaks naela, samas kui robotmesilane on kõigest 80 milligrammi - kergem kui väike kirjaklamber. Teisisõnu, mikrolülituse võime loomine nõuab Ant-Mani taseme kokkutõmbumist.
Tavapäraseid kaameraid ei saanud kasutada, selgitas Dantu, kuna robotid on lihtsalt liiga väikesed - kaamerate sügavuse tajumine eeldab, et nad asuvad minimaalselt üksteisest, nagu silmad, ja droonis lihtsalt pole sellist ruumi. Valguskiirte hõivamine ja analüüsimine vahemaa ja sügavuse tajumiseks oli loogiline tee, kuna see sõltub valguse kogumisest mis tahes suunast. Lisaks tarbivad kaamerad ja pilditöötlus väga palju jõudu, mis on RoboBees ka esmaklassiline. Ligikaudu 97 protsenti robotmesila kogu energiatarbimisest kulub lendudeks; andmetöötlus- ja andurisüsteemid saavad allesjäänud toodete eest võidelda teiste süsteemidega.
Toetuse abil kavandab Koppal uusi kergeid andureid ja Dantu töötab välja matemaatilisi algoritme, et aidata neid andureid kogutud andmeid kõige paremini kasutada. Florida Koppali kolleeg Huikai Xie tegeleb vajalike laserkiirgurite ehitamisega.
Esiteks kasutavad teadlased droonil lainurkoptikaga peeglit, et koguda kaugetest lidari tugijaamadest laserimpulsse ja peenhäälestada anduritele nende andmetega sobiv algoritm. Teine samm on paigaldada droonile laserdiood, mis toite kaudu tugijaama või aku külge toidetakse. Sealt edasi on lõppeesmärk saada see kõik sisemiselt toiteks.
 (Microbiotics Lab, Harvard John A. Paulsoni Tehnika- ja Rakendusteaduste Kool ja Wyss Bioloogiliselt Inspireeritud Tehnika Instituut)
(Microbiotics Lab, Harvard John A. Paulsoni Tehnika- ja Rakendusteaduste Kool ja Wyss Bioloogiliselt Inspireeritud Tehnika Instituut) Microlidarit võis kasutada endoskoopilistes sondides, operatsiooni ajal kasutatavates võlukepp-sarnastes tööriistades, mis kasutavad ultraheli, et visualiseerida siseorganeid ja keha struktuure. Terve robotmesilaste sülem võib jälgida õhusaastet, ilmastikku või liiklusharjumusi suurel alal. Potentsiaalselt võiks kasu olla iga distsipliin, mis praegu töötab lidariga, sealhulgas topograafiline kaardistamine, seismiliste rikete tuvastamine, avastamata maavarade tuvastamine, arhitektuuriline planeerimine ja kanalisatsiooni hooldus.
Ehkki Dantu ja Koppal keskenduvad droonile ehitatud elujõulise lidarisüsteemi hankimisele, on andmete kogumise ja töötlemise takistus, mida nad sageli arutavad. Mesilane või mesilasparv saaks osa andmetöötlusest iseseisvalt ära teha, samuti edastada andmeid ühiselt kodeeritud valgusimpulsside kaudu tugijaamale põhjalikuks arvutamiseks.
Oregoni Riikliku Ülikooli geomaatika dotsent Michael Olsen töötab topograafia ja maastiku kaardistamise uurimisel lidariga, kasutades peamiselt maapinnal asuvaid skannereid rannikuerosiooni, sildade ohutuse ja maavärinatehnoloogia uurimiseks. Ta ütleb, et tavapäraste lidarisüsteemide puhul on suur puudus võime koguda täielikku andmekogumit.
"Vaatevälja piirangute tõttu on meie andmetes paratamatult lünki, " ütleb Olsen. Need RoboBees on potentsiaalselt väga kasulikud, kui nad saavad osa neist lünkadest täiuslikuma mudeli saamiseks täita. Aktiivse lasersüsteemi, näiteks lidari, vähendamine on üsna suur väljakutse ja see, millega teadlased siin tegelevad, on täiesti uus skaala. Tundub, et nad on tulnud välja väga huvitavaid lahendusi võimsuse, kaalu ja suuruse piirangute osas. ”
Kui täielikult teada, võiks mikrolülitusega varustatud mesilasheronite tiir lennata tihedas metsas puude ümber, et paremini tabada iga puu struktuuri või silla tugede alla, skaneerida tavapäraste tehnikate abil keeruline.
Kui lidarit kasutatakse praegu teadusuuringutes ja tööstuslikes rakendustes, võiks mikroliidritel olla palju kodus kasutatavaid või meditsiinilisi otstarbeid. Maja jahimeestel oleks juurdepääs müüdava kodu täielikule 3D-renderdusele ja nad teaksid tubade täpsed mõõtmed, et planeerida, kuidas mööbel võiks sobida. Otsingu- ja päästemissioonid võiksid kammida läbi varisenud ehitiste väikestes ruumides. Kodupõhised süsteemid võimaldavad tuvastada, kas midagi on paigast ära või puudu või kui palju on maa pärast maalihke või maavärinat nihkunud. Ja kulturistid või kaalulangetajad võivad oma keha regulaarselt ja detailselt skaneerida, et teada saada nende edusammude ulatust.
Dantu ja Koppal tunnistavad, et selliseid rakendusi on tulevikus veel palju aastaid, kuid tehnoloogia praktiline olemus on paljutõotav.
"Kui saate RoboBee-l midagi teha, saate seda teha ükskõik kus, " ütleb Koppal. “Microlidar võiks töötada kõikjal, kus tavalist lidarit kasutatakse. Põllumajanduses ja tööstuses on igasuguseid rakendusi, kus inimesed juba kasutavad lidarit tehase korruse või talu kaardistamiseks. Paljudel juhtudel on väiksem ja odavam lihtsalt parem. ”
Ja pidage meeles, et need laserid pole suure võimsusega tõmblukud. RoboBees ei kasuta neid jagamiseks ja vallutamiseks - ainult selleks, et saada täpsemat pilti ümbritsevast maailmast.