Autotranspordist möödasõit maanteel on asi, mis võib panna paljud autosõitjad minema pisut valgest käest, võib-olla mõjuval põhjusel: igal aastal juhtub umbes pool miljonit kaubaveoõnnetust.
Mis saaks aga siis, kui veokid suudaksid ainuüksi maanteeohule reageerida või isegi seda vältida?
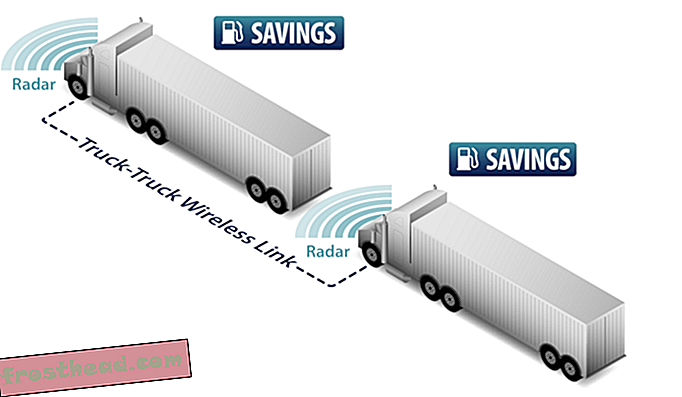
Ränioru orus käivituv Peloton Technology saaks teed muuta nii sõidukite kui ka traktorite-haagiste jaoks turvalisemaks, tehes seda just uue süsteemiga, mis muudab veoautod „rühmaks” või sõidavad paralleelselt ning reageerib eelseisvatele õnnetustele automaatselt.
Seda tüüpi sõiduviis, mida mõnikord nimetatakse sülemlemiseks, toimib sarnaselt muude prototüübisüsteemidega, mida Volvo on testinud Euroopas ja Jaapanis asuvas Uue Energia- ja Tööstustehnoloogia Arendusorganisatsioonis.
See pole "juhita" leiutis: autojuhid hoiavad kätt ratta peal, kuna süsteem ei juhita ning juhtiv juht võib kasutada püsikiiruse regulaatorit või iseseisvalt kiirendada või pidurdada. Ühel veokil töötab süsteem sarnaselt paljude sõiduautode adaptiivse püsikiiruse regulaatori või aktiivse pidurdamisega. Kui ees olev liiklus aeglustub, aeglustub ka veok. Kui teel ilmub ootamatult takistus, pidurdab tõstuk. Kui poolkerapaarid on juhtmevabalt ühendatud - raadiosageduse kaudu, mille just selleks otstarbeks transpordiministeerium on eraldanud, pidurdavad need kaks samaaegselt.
Süsteemi, millel ei ole veel nime ega hinda, saab olemasolevatele traktori järelhaagistele modifitseerida. Süsteem on kohandatud veoautode vajadustele; Peloton ei ole praegu huvitatud ühestki teisest tööstusharust. Sõidukitevaheline kommunikatsioon on aga osa suuremast isesõitvast autoökosüsteemist, mis tuleb välja mõelda enne, kui autonoomsed autod - nagu Google'i tutvustatud autod - saavad teedel ohutust juhtida.
"Meie süsteemis teeb tagumine veok kõik, mis ees on, " ütleb Pelotoni tegevjuht Joshua Switkes. "Esiveoauto kontrollib kiirust ja rakendab pidureid."
Switkesi sõnul reageerivad need automatiseeritud süsteemid kiiremini, kui inimene autojuht kunagi oskas.
„Inimene reageerib tavaliselt ühe kuni kahe sekundi jooksul ja see on parimates tingimustes. Udu korral võib see olla palju pikem. Me vähendame selle aja 0, 001 sekundini. ”
See kiirus võimaldab Pelotoni süsteemil juhtida kahte veoautot korraga.
Pelotoni kontorite keskne operatsioonikeskus otsustab kõigepealt, kas praegused tingimused võimaldavad veoautodel liikuda. Näiteks ei lase süsteem konvoil linnas tekkida ega tugevate vihmade või udu korral. Sellistel juhtudel säilitavad juhid kontrolli.
Tarkvara võtab arvesse ka iga veoki suurust. Raskem veok võimsama mootoriga viib. Sõiduk, mis suudab kõige kiiremini pidureid rakendada - näiteks kergema lastiga sõiduk -, järgib seda alati.
Veokite endi riistvara on üsna lihtne. Iga veoki ette kinnitatud radariandurid jälgivad teed kuni 800 jalga ette. Need andmed suunatakse pardaarvutisse, mis ühendatakse veoki gaasipedaali ja piduritega. Ka draiveritel on LCD-ekraan, mis näitab teise vaatenurka. Tagumise juhi jaoks tähendab see, et ta näeb konvoist kaugemale jäävat teed; juhi jaoks tähendab see tema pimeala nähtavust.
"Saame veokid üksteisele lähemale panna, kui oleks olnud ohutu, kui inimesed käsitsi sõidaksid, " ütleb Switkes. Tavaliselt on ohutu vahemaa umbes 100 jalga; Peloton on katsetanud veoautosid umbes 36 korral, kiirusega kuni 70 miili tunnis.
Nii väikeste vahemaadega sõitmine aitab parandada kütusekulu, kasutades joonistamise tehnikat. Enamasti kasutavad seda jalgratturid ja võistlusautode juhid. Joonistamine võimaldab tagant liikuval sõidukil ära kasutada juhtiva auto poolt lõigatud äratuse. Vähem takistus tähendab, et sõiduk ei pea sama kiiruse saavutamiseks nii pingutama. Järelveetava Pelotoni veoauto puhul tähendab see umbes 10 protsendi vähem kütuse kasutamist.
Samuti on pliiauto jaoks eelis. Haagise suur lame tagaosa loob veoauto taha madala rõhuga ala, mis võib tõstuki tegelikult tahapoole tõmmata. Teise veoki tagant järel sõitmine aitab seda õhku silendada, muutes madalrõhuala väiksemaks ja võimaldades pliitveokil kasutada umbes 4 protsenti vähem kütust kui muidu.
Erinevalt teistest prototüüpidest on Pelotoni teed tee valmisolekule palju lähedasemad. Kuna veoautodel on endiselt juhid ja nad kasutavad olemasoleva aktiivse ohutuse tehnoloogia varianti, ei loeta neid autonoomseteks sõidukiteks. See tähendab, et ettevõte saab neid katsetada ja avalikel teedel kasutusele võtta ilma eriloata, mida nõutakse ettevõtetelt, nagu Google testib juhita autosid. Praegu on ettevõte keskendunud ainult kahe veoki platoonide loomisele, kuid on juba läbinud tuhandete miilide väärtuses edukaid katseid riigimaanteedel, väidab ta. Viimati navigeeris paar veokit lagedal maanteel Interstate 80 lähedal Nevada osariigis Renos.
Peloton alustab lähikuudel pilootprogramme mõne veoautopargiga, millest ükski pole praegu vabalt nimetav. Nende eesmärk on, et süsteem oleks müümiseks valmis 2015. aasta keskel.