Festo nutilind (pilt: Festo) \
Inimese lend on muutunud igavaks. Lennureisid on inimese leidlikkuse ja kujutlusvõime proovilepanek. Koomik Louis CK sõnul „asute toolil - TAEVAS”. See on hämmastav. Ja ikkagi, vaid umbes 50 aasta pärast on lend, mida teadlased ja leiutajad sajandeid on uurinud, muutunud banaalsuseks. Mõnikord isegi ebamugavusi! Ja ehkki oleme taeva õppinud niivõrd, et mehitamata õhusõidukid saab saata ükskõik kuhu planeedile, on siiski veel mõni mõistatus, mida avastada. Kuna droonitehnoloogia võib tunduda olevat ainus valdkond, kus lendude osas tehakse edusamme, on paljud teadlased, nagu näiteks Archytas ja da Vinci enne neid, lummatud millestki, mis tundub palju lihtsam: lindude lend ja võimalusest luua mehitamata väga erinevat laadi õhusõidukid.
Võtame näiteks SmartBird (ülemine pilt) projekti, mille töötas välja Festo, kes on automaatikatehnoloogia ülemaailmne liider. Heeringakajast ja raamatust Jonathan Livingston Kajakas inspireeritud Smartbird on liigendtiibudega robot, mis toimib täpselt nagu nende bioloogiline inspiratsioon, tekitades tõukejõu ja edasiliikumise. Smartbirdi abil soovisid teadlased lindude lendu dekodeerida, et töötada välja masin, mis suudaks õhku tõusta, lennata ja maanduda, kasutades ainult oma tiibade lendlemist. Mehhatrooniline ja küberneetiline terviklik kujundus tehti võimalikuks, kasutades kergeid ehitusmaterjale ja ainulaadset mehhanismi, mis võimaldab tiibadel väänduda ja pöördemomenti pöörata viisil, mis vastab tegelikele lindudele. SmartBird ei ole tingimata lennunduse tulevik, vaid loodi tehnoloogia kontseptsiooni tõestusmaterjalina, mida ühel päeval võib kasutada tõhusama tehase automatiseerimise ja uute elektrigeneraatorite loomisel. Kuid loomulik lendude liikumine ja kajaka "maskeerimine" näib viitavat taktikalisemale kasutamisele.

Robo Raven, mille on välja töötanud Marylandi ülikooli robootikakeskus
Hiljuti on Marylandi ülikooli robootikakeskuse teadlased edukalt käivitanud kaheksa aastat arenduses olnud mikroõhusõiduki. Pärast mitmeid katselende, palju avariisid ja palju muudatusi viis Robo Raven, nagu teada, taevasse esimest korda pärast seda, kui meeskond tegi aprillis läbimurde. Nende uues disainis on programmeeritavad tiivad, mida saab iseseisvalt juhtida, nagu päris linnutiivad, võimaldades sukeldumisi, rulle ja muud akrobaatikat suure kiirusega. Hõbedane mylar-tiivuline robot on palju väiksem ja välimuselt palju abstraktsem kui SmartBird, kuid selle liikumine on uskumatult realistlik. Tegelikult nii realistlik, et see on isegi looduse narritanud - mitu varajast mudelit lõhuti kullide poolt laiali. See on tõesti üsna midagi näha. Projekti edu võimaldasid ka hiljutised edusammud tootmises nagu 3D-printimine ja laserlõikus. Marylandi meeskond soovitab, et ühel päeval võiks robotlindude suhteliselt kerget, odavat ja mitmekülgset tehnoloogiat potentsiaalselt kasutada põllumajanduses ja keskkonnaseireks. Samuti on ka muid võimalusi, sealhulgas valve - Robo Raven on POV-kaameraga juba sisustatud. Kui need robotlinnud muutuvad piisavalt loomulikuks, võivad homse droonid olla treenimata silmale märkamatud.
Kuid linna uurimiseks taeva alt pole vaja droone ega roboteid. New Yorgi arhitektid Aranda \ Lasch on näidanud, et küborgi tuvid saavad hakkama just suurepäraselt.

pildid Brooklyni tuvi projektist, autor Aranda \ Lasch (pilt: Flickr)
Aranda \ Lasch töötas välja Brooklyni tuvide projekti eksperimentaalse bioloogilise satelliidina. New Yorgis kõikjal levinud väljaõppinud tuvide kari varustati väikese aku, videokaamera ja mikrofoniga ning lennutati spiraalmustrina üle Brooklyni. Projekt on nii flokeeriva käitumise dokumenteerimine kui ka katse luua tõeline linnulennuline vaade linnale. Brooklyni tuvide projekti lindude kartograafid on tundlikud keskkonnamõjude suhtes, mida nende kolleegid ei suuda jälgida. Nende lennumudeleid mõjutavad heli, lõhnad ja nende võime tunda Maa magnetvälja vormi. Saadud kaardid erinevad dramaatiliselt kaasaegsete GIS-süsteemide puhttehnoloogilisest "ruudustikust", pakkudes linnale ainulaadset vaatenurka, mis disainerite sõnul "on otseselt vastuolus sellega, kuidas linna tänapäeval üha enam registreeritakse ja esindatakse".

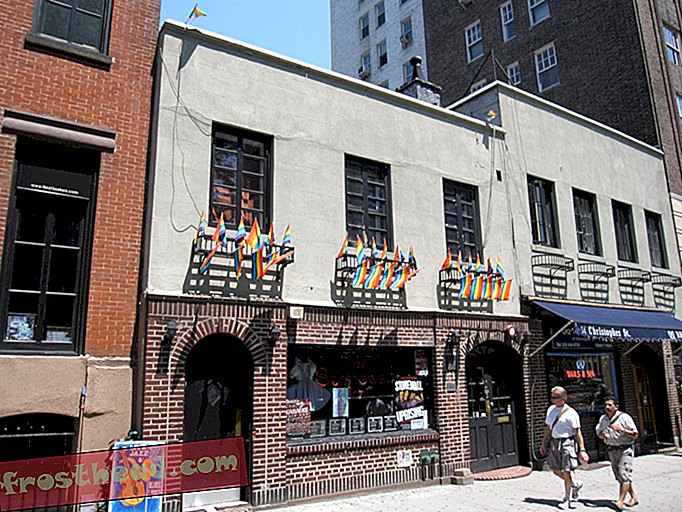
Ülemine pilt: Julius Neubronneri tuvide kaamerad. Alumine pilt: tuvisest tehtud foto (pilt: wikipedia)
Brooklyni tuvide projektil on pretsedent proviisori, leiutaja ja amatöörfoto nime all, mille nimi on Julius Neubronner, kes töötas aastatel 1907–12020 välja kümneid minikaameraid, mis olid mõeldud kinnitamiseks tuvide külge pisikeste nahast rakmete abil. Ehkki Neubronner oli algselt loonud pisut rohkem kui hobina, arvas ta, et tema leiutist kasutatakse sõjaväeliseks otstarbeks, ning tuvide fotograafid olid lühiajaliselt värvatud ja kasutusele võetud, et teha vaenlase piiridest ohutult fotosid (see on osa pidevast loomade militariseerimispüüdlusest, nagu märgitakse ioonide raamatus) loomasõdurite ajalugu). Ehkki Neupronneri seade on BPP-kaameratest pisut ebakindlam, on see ehk geniaalsem.
Põnev on mõelda, et linnumaailmal on meile veel palju õpetada. Püüame ikka veel lindude kogetud maailma jäädvustada - kuidas nad nii elegantselt taeva poole liiguvad, maapinda näevad ja meid ümbritsevaid nähtamatuid jõude tuvastavad. Uus uurimistöö koos uute tootmistehnoloogiatega viib meid pisut lähemale päevale, kui meie taeva täitvad tuttavad lennukid ja hirmutavad droonid asendatakse autonoomsete, looduslikult lendavate, kõike nähtavate robotlinnudega. Vaatamata sajanditepikkusele uurimisele oleme alles hakanud lahti tegema saladusi, mida loodus on eoonide abil täiustanud.