Virtuaalse reaalsuse peakomplekti abil saate näha ja kuulda teisi maailmu, kuid siiani ei saa te neid puudutada. See võib muutuda uue prototüübi kinesteetilise kinda abil, mille on ehitanud California ülikooli San Diegos.
Seotud sisu
- Tehke virtuaalne reis rahvusvahelisse kosmosejaama
- Puutemaastiku kaardistamine
Kinesthetic on tagasiside tagasiside süsteemist, mis on loodud teabe edastamiseks läbi millegi vastu surumise. See on haptika valdkonna alamhulk, mille eesmärk on aidata inimestel puutetundlikkuse kaudu maailma mõista.
Niisugune kinnas, mis kasutab pehmest robootikast laenatud tehnikaid kasutaja sõrmedele tagasi surumiseks ja puutetundlikkuse simuleerimiseks, võib olla oluline virtuaalse ruumi uurimisel tulevikus, lisades virtuaalsele reaalsusele rohkem sensatsiooni ja seeläbi ka reaalsust. Selle loojad väidavad, et sellest võib saada uus virtuaalsete mängude või isegi meditsiiniseadmete kontroller.
"Kui inimesed mõtlevad haptikumidele, mõtlevad nad tavaliselt mürakule või vibreerivale kontrollerile, näiteks kui teie telefon vibreerib, mis annab teile kombatavat tagasisidet väga lihtsal viisil ... sellele pole mingit suunavat komponenti, " ütleb lisand Jurgen Schulze UCSD arvutiteaduse professor, kes on spetsialiseerunud virtuaalreaalsusele ja aitas prototüüpi välja töötada. “Kindaga on see, mida te teha saate, teoreetiliselt, teha esemeid, millest kinni haarate, ja käes hoida, et need tunneksid, nagu nad seal oleksid. Nad on endiselt kaalutu, kuid vähemalt on neil helitugevust ... See on samm sammu võrra kõrgem ja üsna suur, kõrgem kui lihtsalt vibratsiooni tagasiside. "
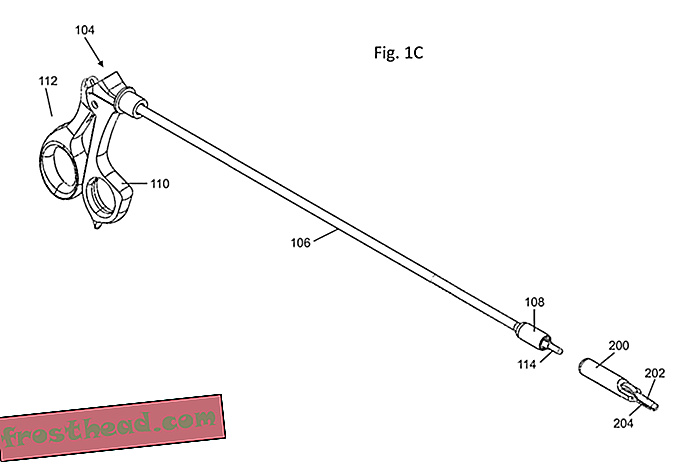
UCSD meeskond kaunistas kinnast pneumaatiliste “lihastega”, nagu need, mida leidub pehmetes robotites. Jaotades käe tagaosa, õhuga täidetud kotid täidavad või tühjenevad, et tekitada sõrmedele suunatud rõhk. Õhumahutid on kaetud punutud kiududega ja pump täidab pumba täituvust. Seade on rihmaga painutatud silikoonist eksoskeleti külge, mida saab kanda üle käe selja. Jälgimisseade jälgib kasutaja käe liikumist ja rõhu tagasiside põhineb selle käe asendi lugemisel.
Pange kinnas koos paari kaitseprillide ja komplekti kõrvaklappidega ning teile antakse virtuaalne klaver, mida saate tunda, kui puudutate klahve. Klahvile vajutamisel õhukotid õhku paiskuvad, tõmbuvad vastu sõrme tagasi ja simuleerivad seda puudutust. Testi kasutajate sõnul oli tulemus „võluv”, ehkki nad märkasid reageerimise kiiruse hilinemist.
Praegu on teos prototüüp ja kinnas töötab ainult klaverirakendusega ja ainult siis, kui jälgimisseade mõlemat kätt “näeb”. Tulevased versioonid võiksid UCSD-s lõputunnistust pehme robootikaga süsteemide kavandamisel õpetava inseneriprofessori Mike Tolley sõnul kaasata integreeritud andurid, mis saavad asukohakinnitust kindast endast, mis suurendaks täpsust ja leevendaks probleeme, näiteks kui üks käsi on paigutatud teise ette.
Tolley ja Schulze kujutavad rakendusi mängudes ja virtuaalsetes treeningutes, kuid näevad potentsiaali ka robotoperatsioonil. Üks roboti abil toimuva kirurgia nippe on tagasiside. Kõige populaarsem seade DaVinci pakub ainult visuaalset tagasisidet; kirurg juhib seda kahe juhtkangi kaudu, kuid tugineb visuaalsetele näpunäidetele, et öelda, millal edasi liikuda või millal survel tagasi pöörduda.
„Kui olete DaVinciga mänginud, siis teate, et saadud tagasiside on visuaalne, saate stereoülevaate. Ja see on üsna hea, inimesed on sellega palju ära teinud, isegi ilma jõudude tagasisideta, ”ütleb Peter Kazanzides, arvutiteaduse professor ja Johns Hopkinsi ülikooli robootikakirurgia ekspert, kes polnud UCSD projektiga seotud. "Kogenud kirurgid õpivad, kuidas nende rakendatavat jõu suurust sisuliselt hinnata, vaadates, kui õmblus on pingutatud või kui palju kude venib."
See ei tähenda, et haptiline tagasiside ei saaks sellist süsteemi täiustada. Kuid Kazanzides juhib tähelepanu veel ühele probleemile, mis tuleks kõigepealt lahendada: DaVinci-l pole viise jõudude tunnetamiseks.
Roboti ehitamiseks, mis suudab kasutajatele jõude tagasisidestada, peab ta suutma tunda survet, mida ta pinnale (või kehale) avaldab. Sellised andurid on tavaliselt liiga suured, liiga kallid ja mitte meditsiinilised. Ehkki on raske täpselt öelda, millisel kujul jõu tagasiside robotil abistatava operatsiooni korral võib ilmneda, möönab Kazanzides, et sellest võib siiski kasu olla.
Tolley, Schulze ja UCSD grupi jaoks on lähitulevik seadme potentsiaal virtuaalse reaalsuse uurimisel ja mängimisel, nagu vana Nintendo Power Glove, kuid tagasiside abil. Nende tähelepanu keskmes on virtuaalse klaviatuuri abil realistliku vastuse saamine. "Virtuaalse reaalsuse väljakutse, eriti mehaanikainsenerile, seisneb selles, et saada õige tunne, " ütleb Tolley.