Inimestel - eriti neil, kes töötavad tootmises - on üsna tavaline sõlm siduda, riisuda ümbris kaabli küljest, sisestada tihvt auku või kasutada käsitööriista, näiteks puurit. Need võivad tunduda lihtsate ülesannetena, kuid on tõesti väga keerulised ja hõlmavad väga peeneid sõrme- ja käeliigutusi.
Seotud sisu
- Kuidas robotid lahkusid laborist ja hakkasid inimesi aitama
Ehkki robotid osalevad üha enam tehase töös ja paljudes muudes töökohtades - sealhulgas teeninduses ja tervishoius -, pole nende osavus sugugi nii muljetavaldav. Kuna inimesed viisid nad esmakordselt autotööstusesse tööle rohkem kui 50 aastat tagasi, oleme ehitanud roboteid, mis suudavad osi üsna hästi keevitada, värvida ja kokku panna. Tänapäeva parimad robotkäed saavad tuttavaid objekte korjata ja mujale viia - näiteks võtta tooteid laokannudest ja panna kastidesse.
Kuid robotid ei saa käsitööriista õigesti suunata - näiteks villida Phillipsi peaga kruvikeeraja kruvi soontega või suunata haamer küünte külge. Ja kindlasti ei saa nad kahte kätt koos üksikasjalikult kasutada, näiteks vahetades patareisid puldis.
Inimese käed on neil ülesannetel suurepärased ja palju muud. Isegi selleks, et konkureerida sellega, milleks meie käed on kergesti võimelised, vajavad robotkäed paremat paindlikkust, töökindlust ja tugevust - ning selleks, et aru saada, mida nad vajavad, peavad robotkäed olema võimelised paremini tajuma ja liikuma veelgi peenemalt kui praegu. uuesti käes hoidmine ja kuidas seda kõige paremini kinni hoida. Et robotid saaksid töötada koos inimestega, peame välja mõtlema, kuidas teha roboteid, mis võivad meile sõna otseses mõttes kätt anda, kui meie kahest ei piisa.
Minu Kirdeülikooli uurimisrühm töötab just selle nimel, eriti humanoidrobotite puhul nagu NASA Valkyrie, millel on kolm sõrme ja pöial mõlemal käel. Igal numbril on noakujulised liigendid ja igal käel on randmeosa, mida saab hõlpsalt pöörata. Töötame liikumiste loomisel - käe, randme, sõrme ja pöidla liigutuste kombinatsioonid, mis täidavad ühiselt mingit ülesannet, näiteks liigutame mutrivõtit ringis poldi pingutamiseks või vankri vedamist ühest kohast teise.
 Igal neist tööstusrobotitest on mitu spetsialiseeritud tööriista. Kas paljusid nende ülesannetest saaks teha robotkäte abil? (Steve Jurvetson / flickr, CC BY)
Igal neist tööstusrobotitest on mitu spetsialiseeritud tööriista. Kas paljusid nende ülesannetest saaks teha robotkäte abil? (Steve Jurvetson / flickr, CC BY) Käte tähtsus
Selle asemel, et teha igast robotist väga konkreetse ülesande jaoks kohandatud masin, peame kavandama mitmeotstarbelised robotid või isegi sellised võimekad masinad, mida võiks nimetada „üldotstarbelisteks” - hea peaaegu iga ülesande jaoks. Seda tüüpi robotite edu üheks võtmeks on suurepärased käed.
Meie töö keskendub uue kohandatavate robotkäte klassi kujundamisele, mis on võimeline täpseks peeneks liikumiseks ja autonoomseks haaramiseks. Kui robotid suudavad küüntesse haamri teha, vahetada patareisid ja teha muid sarnaseid liigutusi - inimeste jaoks põhilised, kuid robotite jaoks väga keerulised -, siis jõuame robotite kätes hästi inimlikule osavusele.
Selle eesmärgi saavutamine hõlmab ka uute, kõvade ja pehmete elementidega disainilahenduste leiutamist - see, kuidas inimese luu haardejõudu annab, nahaga survet avaldades, et veiniklaas ei puruneks.
Kiirem arendamine ja testimine
Kaasaegsed tehnoloogilised täiendused muudavad arendusprotsessi lihtsamaks. 3D-printimisega saame prototüüpe teha väga kiiresti. Saame isegi valmistada odavaid ühekordselt kasutatavaid komponente, et proovida mehhanismide erinevat paigutust, näiteks kahe- või kolme sõrmega haaratsid lihtsate kättetoimetamistoimingute jaoks või antropomorfsed robotkäed õrnemate toimingute jaoks.
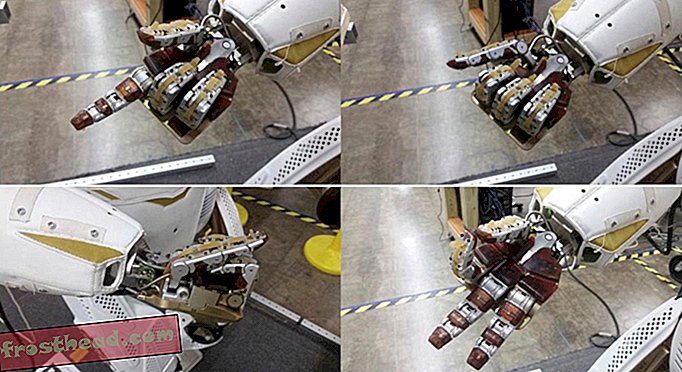 Erinevat tüüpi käed NASA Valkyrie robotil. (Kirdeülikool, CC BY-ND)
Erinevat tüüpi käed NASA Valkyrie robotil. (Kirdeülikool, CC BY-ND) Kuna elektroonilised kaamerad ja andurid muutuvad väiksemaks, saame neid ka uutel viisidel kasutada. Näiteks kui paneme rõhuandurid ja kaamerad robotkätesse, saavad nad anda robotikontrollerile tagasisidet (olgu see siis inimlik või automatiseeritud), kui haare on kindel või kui midagi hakkab libisema. Ühel päeval suudavad nad tajuda, millises suunas libisev objekt liigub, nii et robot suudab selle tabada.
Need võimed on nägemise ja proprioceptsiooni kaudu inimesele juba teine loomus (võime tunnetada kehaosade suhtelisi positsioone seda vaatamata või sellele mõtlemata). Kui suudame neid robotites saavutada, saavad nad teha näiteks tuvastada, kas haare on liiga tugev ja pigistab eset liiga tugevalt.
Kooskõlastatud liikumiste kavandamine
Veel üks verstapost on meetodite väljatöötamine robotitele, et selgitada välja, milliseid liikumisi nad reaalajas tegema peavad, sealhulgas iga hetkega nende kätes toimuva tundmine. Kui robotikäsi suudab tuvastada muutusi käideldavates objektides või manipuleerida esemeid hoides, võib see aidata nende tavaliste käsitsitoimingutega nagu sõlme sidumine ja traadi eemaldamine.
Kahe käega koos töötamine on veelgi kaugemale tulevikku, ehkki see annaks olulise tõuke, eriti tootmises. Robot, mis suudab kahe käega külvikut juhtida või masina osi ühest käest teise suunata, oleks suur edasiminek, mis võimaldaks tehastel oma protsessides veelgi rohkem automatiseerida.
 Kas see on tuleviku robot? (NASA)
Kas see on tuleviku robot? (NASA) Meie, inimesed, pole neid süsteeme veel välja arendanud. Inimesele sarnase autonoomse robotite osavuse saavutamine hoiab robootikauurijaid, tehnolooge ja uuendajaid lähitulevikus hõivatud. See ei aeglusta käimasolevat robootikarevolutsiooni tootmises, sest praegustel protsessidel on turvalisuse, kiiruse ja kvaliteedi parandamiseks veel palju ruumi automatiseerimiseks. Kuid kui me muudame roboteid veelgi paremaks, saavad nad meile käe anda.
See artikkel avaldati algselt lehel The Conversation.
Taskin Padir, Kirde ülikooli elektri- ja arvutitehnika dotsent