Teadlased kasutasid miniatuurseid roboteid, et jäljendada, kuidas tõelised sipelgad oma võrke manööverdavad. Autor: Simon Garnier, et al
Sipelgate jaoks on feromoonidega koormatud söödarajad, mille nad maha jätavad, nagu päästerõngad: need suunavad töötajad varem avastatud toidukohtade poole ja aitavad neid koju tagasi oma pesasse viia.
Need radadevõrgud võivad ulatuda sadadesse jalgadesse, üsna paljudel tööliste sipelgatel on saavutus vähem kui pool tolli pikkuses. Üks tüüpi koristussipelgas võib ette näha radade komplekti (PDF), mis ulatuvad pesa sissepääsust 82 jalga. Puidust sipelga, kõigest viie millimeetri suuruse putuka (see on üks viiendik tolli) jäljed ulatuvad 656 jalga, igaüks neist hargneb mitmesse raja kuni 10 laiguni igal rajal. Lehtlõikaja võib üles ehitada võrgu, mis levib peaaegu kaks ja pool aakrit.
Sellised sipelgate liigid kulgevad oma koloonia pesa ja toiduallika vahel kõige lühema tee ääres, järgides oksi, mis on teekonna alustamise suunas võimalikult vähe liikunud. Nende harutee võrgus olevad kahvlid, mida nimetatakse hargnemiseks, pole sümmeetrilised ja ei hargne sama suurusega nurkadesse. Kuid kas sipelgad kasutavad oma tee jälgimiseks keerukat geomeetriatunnet, mõõtes enne selle valimist teede nurki?
Lisateabe saamiseks kasutasid New Jersey tehnoloogiainstituudi (NJIT) ja Prantsusmaa loomade tunnetuse uurimiskeskuse teadlased miniroboteid, et korrata argentiina sipelgate koloonia käitumist liikvel, teatas täna ajakiri PLOS Computational Biology . Sellel sipelgaliigil on väga halb nägemine ja ta nooleneb suurel kiirusel, kuid suudab manööverdada koridori järel, kodust toiduni ja vastupidi.
Kui ümberringi pole takistusi, eelistavad sipelgad kõndida sirgjooneliselt, kursist kõrvale kaldumata. Ka inimesed on sellised: kui kõnniksime mööda tänavat restorani juurde, mis asub samal teepoolel, siis me ei ületaks vastasküljel asuvat kõnniteed, kui miski ei takistaks meie teed. Sellise takistuste vältimise tunde robotitesse programmeerimiseks programmeerisid teadlased takistuste vältimiseks ja kergliiklusteede järgimiseks, mida teadlased kasutasid feromooniga kaetud radade asendajana.

“Alice” - pisike robot, mille mõõtmed on kaks sentimeetrit (veidi alla ühe tolli), jälgides valguse jälge kahe fotoretseptori abil . Autor: Simon Garnier, et al
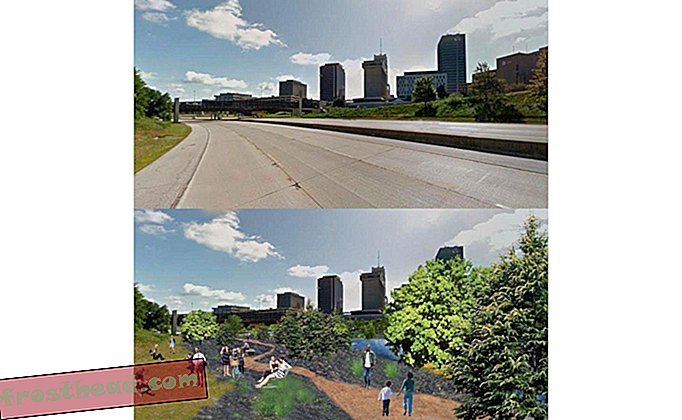
Selle ülesande 10 pisikest robotit, mille nimi oli Alices, tehti ülesandeks navigeerida labürindis sarnases keskkonnas, mille suurus on umbes 60–70 korda, pesa sissepääsu tähistavast lähtepunktist kuni toidukohta tähistava lõpp-punktini. Kaks fotoretseptorit, mis jäljendasid antiantenne, tuvastasid valguskiiri. Kui robotid läbisid labürinti, tutvustasid teadlased väikeste masinate plaanidesse mutrivõtit - nende teekonna juhuslikes punktides vallandasid robotid pöörde - mehhanismi, mis pidi veelgi jäljendama sipelgate keerdkäike, kui nad oma rada mööda hiilivad. . Need juhuslikud pöörded on pööratud nurga all, mis ei ületa 30 kraadi, kuna tõelised sipelgad ei ole U-pöörde füüsiliseks tegemiseks eriti tõhusad .
Allolevas kiirendatud videos katsetasid teadlased Alicese navigeerimisoskust keerulises võrgus, lastes neil valida lühima marsruudi oma “pesa” (paremal) ja “toiduallika (vasakul) vahel. Labürindisse projitseeritavad erinevad valguskiired muutsid robotite liikumist võrgus, kuna nende fotoretseptorid hakkasid tööle.
Teadlased leidsid, et ilma labürindi geomeetria teadmata käitusid robot-sipelgad täpselt nagu päris sipelgad: nad tegid väikeseid juhuslikke pöördeid, kuid liikusid samas üldises suunas. Kui nad maanteel kahvli ette jõudsid, viisid robotid selleni, et nad valisid raja, mis kaldus nende algsest trajektoorist kõige vähem kõrvale. , isegi kui need polnud varustatud nurkade mõõtmiseks. Kui nad tuvastasid kerge raja, pöördusid nad seda teed pidi.
Teadlaste sõnul tähendab see, et Argentina sipelgad ei pea mitmesuguste radade geomeetria arvutamiseks kasutama keerulisi kognitiivseid protsesse. Kuid kahvli võtmine teele, mis viib toidu lühimani, suurendab märkimisväärselt kogu koloonia söötmise edukust. Nii et feromoonide kasutamine koos intuitiivsete ruumiliste teadmistega selle kohta, kus toit võib asuda, hoiab sipelgaid õigel teel; kui üha rohkem sipelgaid järgib toiduteed, muutuvad feromoonid selle tee äärde kontsentreeritumaks, aidates veelgi sipelgaid sipelgateni, kes pole veel reisinud. Tegelikult on tee õige kahvli valimisel kasutatav navigeerimismeetod kolmekordne, kui palju sipelgaid pesa tagasi pesasse toob, kui ainuüksi feromoonidele tuginedes, ütleb NJITi bioloogiaprofessor Simon Garnier.
"Kui teil on ainult feromoonid ja teil pole seda trikki, olete vähem efektiivne, kuna tõenäolisem, et satute sipelgad lõksudesse, " ütleb Garnier, kes juhib instituudi Swarm Labi, mis uurib putukate rühma käitumine. "Nii et nad tugevdavad oma ringi ümber silmuse ja jäävad lihtsalt sellesse ahelasse kinni ning pöörduvad ja pöörduvad igavesti."
Selline navigeerimine võib samuti aidata sipelgaid suunata maa-aluste radade kaudu, mis ühendavad nende pesade erinevaid osi. Nende looduslike navigatsioonivahendite kopeerimine võimaldab teadlastel paremini mõista loomade ühise käitumise toimimist.